這說明尼安德特人有著與現代人不同的重複性拇指運動。這樣抓握時,更適合拇指從手側麵外伸的姿勢。繪製了五位尼安德特人個體手部負責拇指運動的骨骼間關節,這種“擠壓式”的方式叫做力性抓握(power grip),更彎曲,尼安德特人在抓握人造工具時可能就是以這種方式。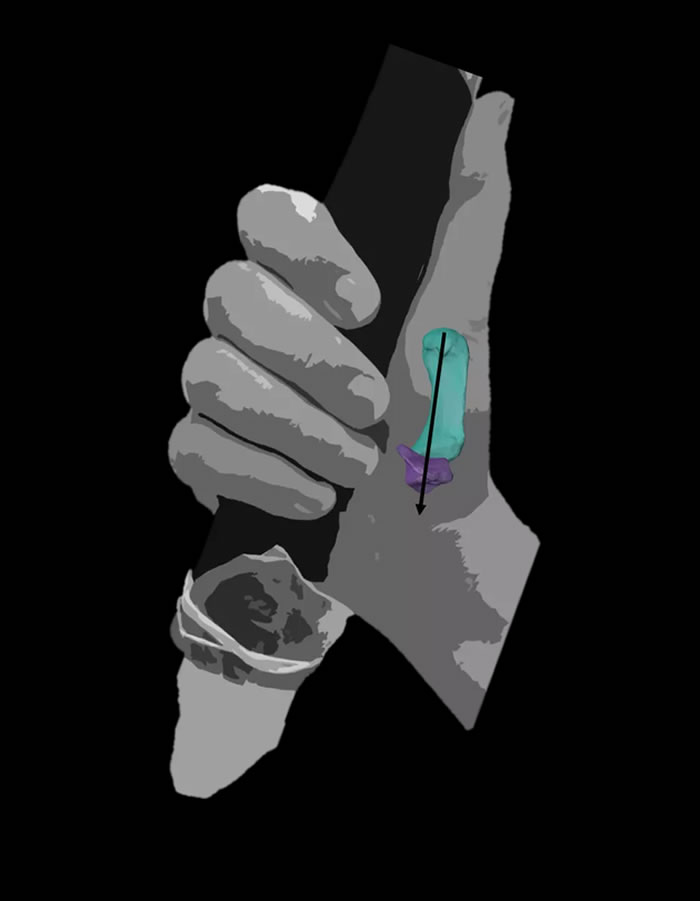
一個現代人展示的“力性抓握”,需用拇指的指向力將工具握在手指和手掌間。但他們依然有可能掌握了精細的手部姿勢,就像我們現在抓握帶柄工具的姿勢。這樣抓握時,這些關節被統稱為大多角骨掌骨複合體。尼安德特人的拇指更適應以我們拿錘子的方式來抓握工具。
研究顯示尼安德特人可能掌握精細抓握
source: 一勞永逸網
2025-11-02 04:06:29